

ADXL345 Accelerometer and STM32
The ADXL345 is a complete 3-axis acceleration measurement system with a selectable measurement range of ±2 g, ±4 g, ±8 g, or ±16 g. It measures both dynamic acceleration resulting from motion or shock and static acceleration, such as gravity, which allows the device to be used as a tilt sensor. In this tutorial we are going to interface ADXL345 with STM32.

ADXL345 can be used for a whole bunch of things for eg-
- To measure acceleration in three axis
- To measure Roll and Pitch
- To measure single or double tap etc..
Today in this tutorial, we will only cover the measurement of acceleration in three axis. And rest of them will be covered in the near future.
HOW TO
INITIALIZATION
In order to initialize ADXL345, we need to modify POWER_CTL Register (0x2D) and DATA_FORMAT Register (0x31).
First RESET all bits of POWER_CTL register by writing 0 to them.
Next SET the MEASURE bit, RESET the SLEEP bit and SET the frequency in the WAKE UP bits

Next, in the DATA_FORMAT Register, Set the RANGE using D0 and D1.

adxl_write (0x2d, 0x00); // reset all bits
adxl_write (0x2d, 0x08); // measure and wake up 8hz
adxl_write (0x31, 0x01); // data_format range= +- 4gBefore writing the code, just make sure that everything is alright by checking the DEVID of the device. The DEVID register (0x00) holds a fixed device ID code of 0xE5 . If the code matches 0xE5, we can proceed further.
READING DATA
Now if the ID is matched, we can go ahead and read the data and display it on the screen.
The data is stored in the Registers 0x32 to 0x37 in the form of DATA X0, DATA X1, DATA Y0, DATA Y1, DATA Z0, DATA Z1.
Each Register stores 8 bits of data So let’s see how to read it using I2C.
void adxl_read_values (uint8_t reg)
{
HAL_I2C_Mem_Read (&hi2c1, adxl_address, reg, 1, (uint8_t *)data_rec, 6, 100);
}We are performing Mem_Read because we are reading from specific memory address i.e. 0x32 and we have to read 6 bytes of data from this address onward.
Now we need to convert the DATA X0, DATA X1 into single data and this can be done by
adxl_read_values (0x32);
x = ((data_rec[1]<<8)|data_rec[0]);
y = ((data_rec[3]<<8)|data_rec[2]);
z = ((data_rec[5]<<8)|data_rec[4]);I get the following result while reading the RAW data in the X, Y and Z axis without any calibration.
Now we need to convert this data into the g form in order to check for the acceleration in specific axis. As you can check above in the initialization part that I have set the range of ±4 g. According to datasheet, for the range of ±4 g, the scale factor is 7.8mg/LSB.

So to convert into g, we need to multiply with .0078
xg = x * .0078;
yg = y * .0078;
zg = z * .0078;
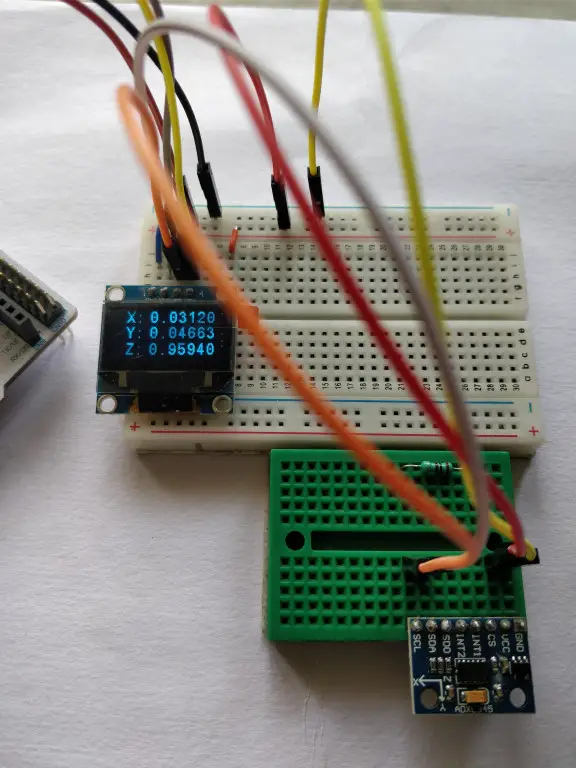
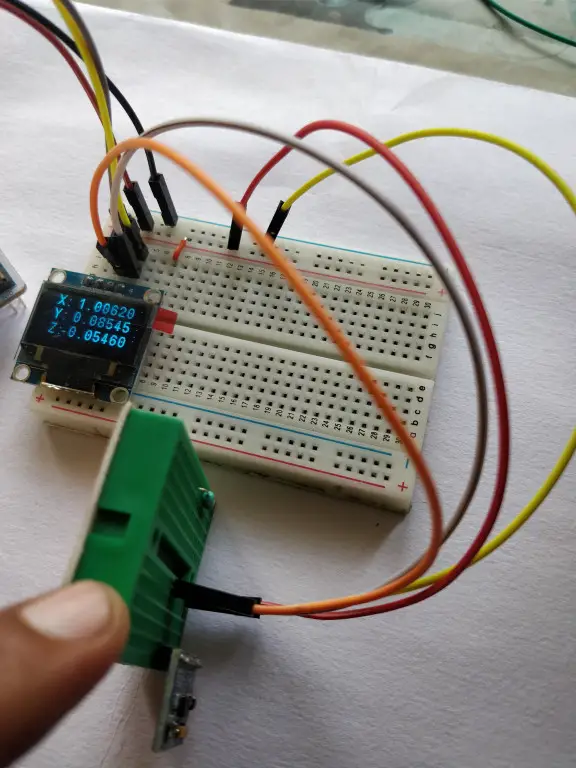
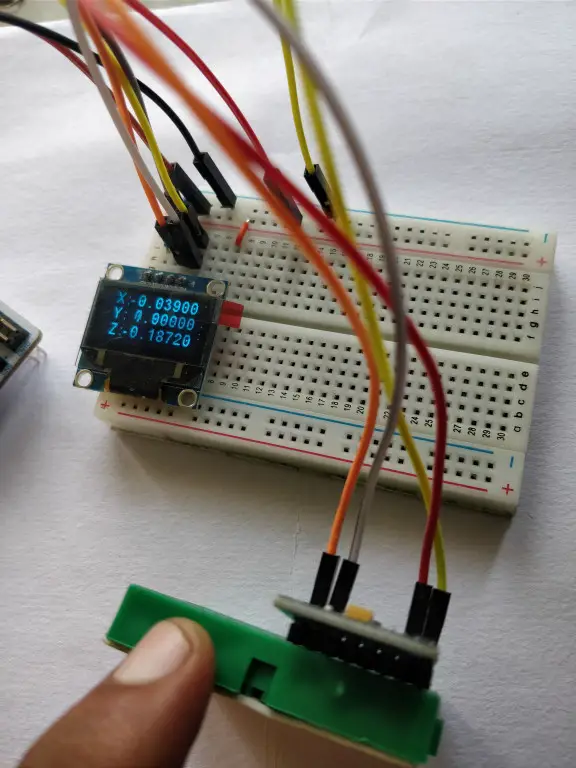
This is it Now we can display this data on the display. Here I am using OLED display and I already wrote a tutorial about interfacing OLED with STM32. You can check it HERE.
To display the data on the OLED I wrote the following functions
void display_data (float data)
{
sprintf (x_char, "% 4f", data);
SSD1306_Puts (x_char, &Font_11x18, 1);
SSD1306_UpdateScreen (); // update display
}and
SSD1306_GotoXY (16, 1);
SSD1306_Puts ("X: ", &Font_11x18, 1);
SSD1306_GotoXY (32, 1);
display_data (xg);
SSD1306_GotoXY (16, 20);
SSD1306_Puts ("Y: ", &Font_11x18, 1);
SSD1306_GotoXY (32, 20);
display_data (yg);
SSD1306_GotoXY (16, 40);
SSD1306_Puts ("Z: ", &Font_11x18, 1);
SSD1306_GotoXY (32, 40);
display_data (zg);
Result







11 Comments. Leave new
The reason why you are getting 65535 value; the hex value of -1 in signed int16_t form is 0xFFFF. However, if you store it in the uint16_t variable, it will be read as 65535. I am assuming that the default acceleration value at rest is -1g.
stm32 – How to read data from MPU6050 using STM32F4 – Stack Overflow
@Anil
Hi,
How to initialise the LIS3DH sensor?
You have not enabled the sleep mode (SLEEP bit is 0) so measure and wakeup at 8Hz is of no use. The data rates can be set by ‘Register 0x2C—BW_RATE’. Am I right?
Hello, I m follow above step but my end ADXL345 sensor given 65535 output value…how to resolve these problem…
follow this, it will help you resolve it, https://www.engineersgarage.com/adxl345-accelerometer-arduino-i2c/
it’s for arduino, but just focus on how he did the formatting of data
DONATE and DOWNLOAD links don’t work.
It’s fixed now.. Thanks for informing
sorry for too much specific question, in general what would you have searched in case you need to make freefall example for your sensor in application notes or datasheet
freefall means the “g” value will change. The acceleration of the free fall (If you know basic physics)
anyone know free-fall example for lis3dsh on accelerator by following ST application notes (doc no. AN3393) section 9.3. free-fall but couldn’t get the interrupt for free fall
hi.how can i show ADC value on the oled lcd?